Preparing Embedded Computer
Initial Setup
Connect your Jetson TK1 to a router using Ethernet cable. The router should be connected to the Internet. Power up the board.
Become aware of Jetson TK1’s IP-address using standard access to your router. There is a good practice to make IP-address fixed. Let us assume IP address to be 192.168.0.17 for example.
We assume Ubuntu Linux is used on a host computer. You may use any other host OS that supports SSH/SCP protocol and FFMPEG.
In order to connect to Jetson TK1 use remote access over SSH. Default user has username ubuntu and password ubuntu. Run on the host (substitute IP address with your one):
ssh ubuntu@192.168.0.17
You should see something like following:
The authenticity of host '192.168.0.17 (192.168.0.17)' can't be established. ECDSA key fingerprint is SHA256:GS/96BHj/MoQ1OPeG25oNGJWfAE+wtfn8lyEM4JBkkE. Are you sure you want to continue connecting (yes/no)?
Type yes and press enter. While prompted to enter the password type ubuntu and press enter.
Good idea is to update all packages. Run on board:
sudo apt update sudo apt upgrade -y
Installing Software
Firstly install snapd if it is not yet installed:
sudo apt install snapd
Now you may install the CamAdapter application:
sudo snap install camadapterd --devmode
Test whether the software installed successfully:
camadapterd --version
Before running camadapterd some final steps are to be implemented.
CamAdapter Addons
By default JetPack Linux OS image has not built-in CAN bus and GadgetFS support needed for running camadapterd. Therefore, one needs to rebuild Linux kernel with correspondent modules.
Linux kernel building description is out of the scope of this guide but you may download prebuild binaries here (for kernel version 3.10.40):
github.com/airmast/camadapterd/releases/download/addons/camadapter-addons.tar.gz
This package contains required kernel objects and a startup script that combine all commands mentioned below.
CAN Bus Configuration
Install drivers needed (being logged in as the root user or using sudo):
insmod can.ko insmod can-raw.ko insmod can-dev.ko
Then setup CAN bus device according to its instructions.
- Format: SocketCAN
- Bitrate: 1 000 000 bps
- Default device name: can0
GadgetFS Configuration
Install driver and setup device (being logged in as the root user or using sudo):
insmod gadgetfs.ko mkdir /dev/camgadget mount -t gadgetfs none /dev/camgadget
USB OTG Configuration
Jetson TK1 USB OTG should be switched to Device mode (by root user):
echo 0 > /sys/devices/platform/tegra-otg/enable_host echo 1 > /sys/devices/platform/tegra-otg/enable_device
Usage
In order to get information about available options run:
camadapterd --help
By default one may run the application without any parameter (by root user):
camadapterd
Open in your browser: http://192.168.0.17:8123
You should see something like following:
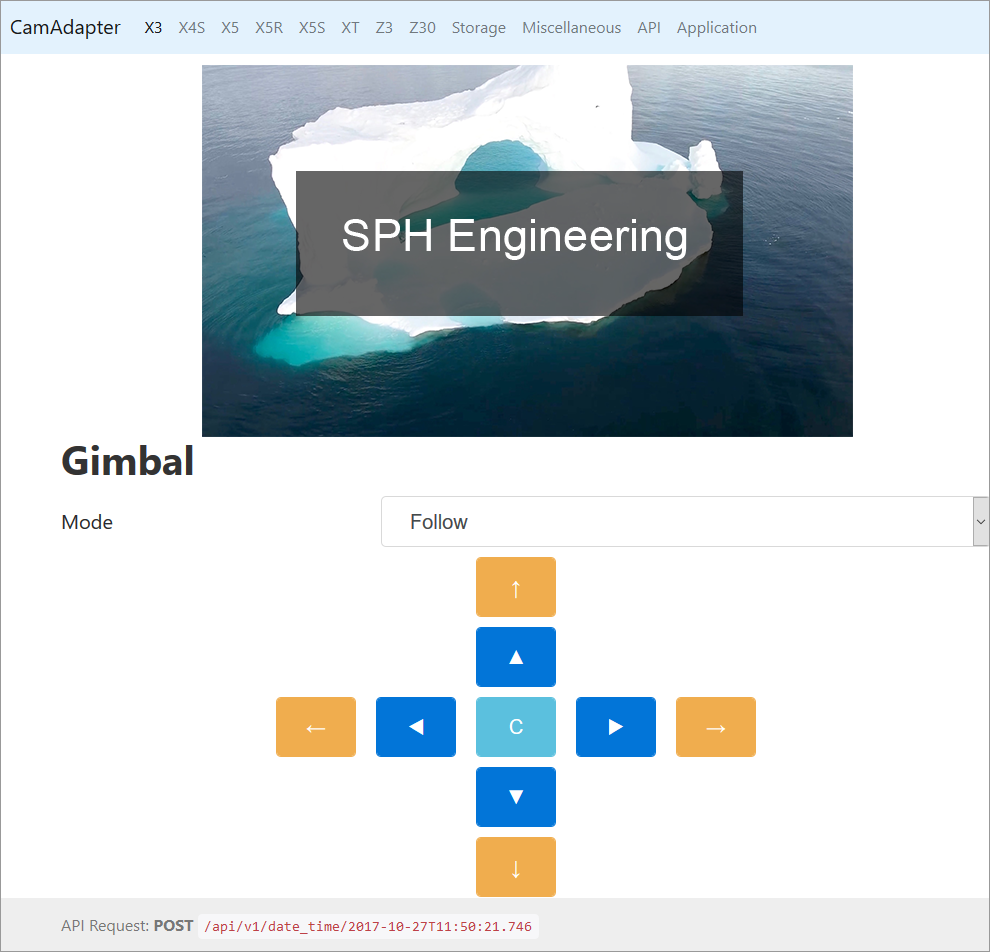
It is the right time to activate your copy of the application.